
Okay, so I'm trying to find an maneuverable ATV design that's simple and doesn't use more than 4 wheels. I think the basic four-wheeler design will be the best and most efficient idea for my project.
My question is, what kind of wheel and axel system should I use, and how should I construct it?
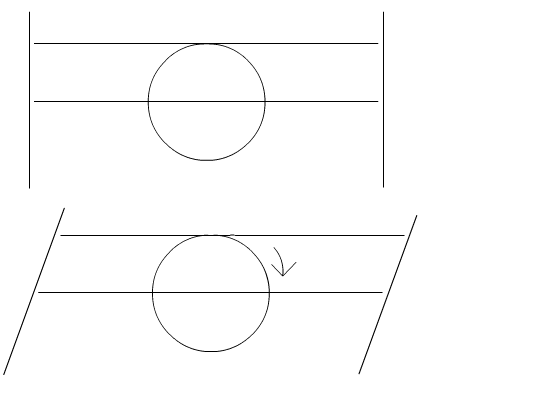
I already have my ATV robot running forwards and backwards. It can do wide turns and point turns by increasing and decreasing the output of the motors. What I want to do is make the wheels themselves turn, to make it more useful in an obstacle course or outdoor environment.
I'm using the Mindstorm's LEGO NXT kit if that helps.
Edit: Wow... you suck, FFRers -_-'
My question is, what kind of wheel and axel system should I use, and how should I construct it?
I already have my ATV robot running forwards and backwards. It can do wide turns and point turns by increasing and decreasing the output of the motors. What I want to do is make the wheels themselves turn, to make it more useful in an obstacle course or outdoor environment.
I'm using the Mindstorm's LEGO NXT kit if that helps.
Edit: Wow... you suck, FFRers -_-'





Comment